Abstract
Cooperative rendezvous/docking is an enabling technology for future autonomous missions. However, it is still a challenge to design a fully distributed, stability-guaranteed control method for cooperative rendezvous. To address this issue, this paper proposes a distributed control method for an unmanned vehicle cooperative rendezvous mission. First, the cooperative rendezvous process is formulated as an optimal control problem. To decentralize the control framework, a rendezvous parameter is introduced, and the rendezvous parameter optimization algorithm is designed to guarantee the terminal rendezvous of autonomous vehicles while improving the system performance. On this basis, a distributed control framework, based on rendezvous parameter optimization, generates the control commands to achieve cooperative rendezvous. Results demonstrate the effectiveness of the proposed distributed control approach through three simulations.
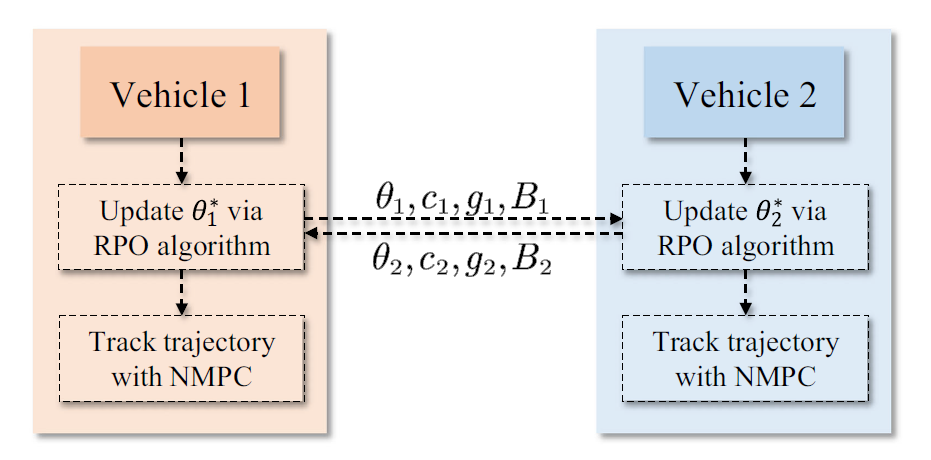
Distributed control approach based on rendezvous parameter optimization
Information
Z. Wei, Z. Shao, L.T. Biegler, “Distributed control method for vehicle cooperative rendezvous,” Journal of Guidance, Control, and Dynamics, 2025. DOI: 10.2514/1.G008445. [Paper]