[1] Distributed Control Method for Vehicle Cooperative Rendezvous
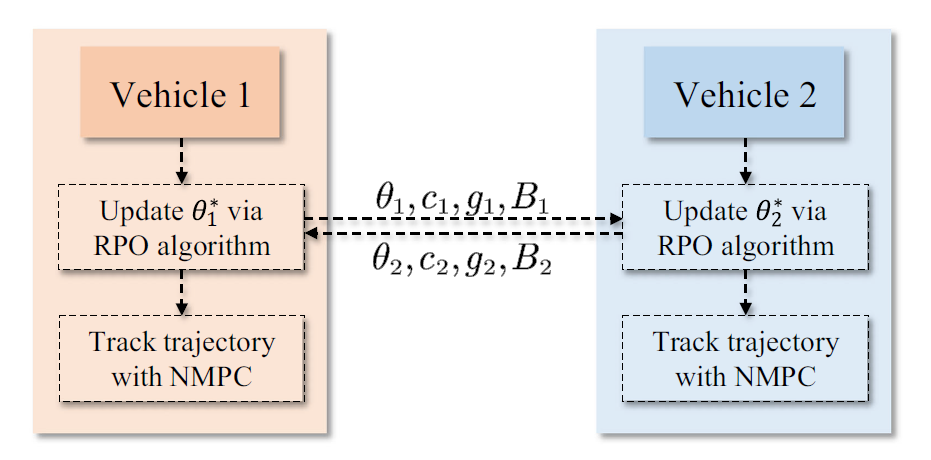
We proposed a distributed control method for an unmanned vehicle cooperative rendezvous mission. The approach is fully distributed and guarantees input-to-state stability for the unmanned air/underwater vehicle cooperative rendezvous process.